
Descripción general
La grúa puente, comúnmente conocida como "conducción", es un tipo de maquinaria de elevación ampliamente utilizada en empresas industriales y mineras, su mecanismo operativo se compone de tres sistemas de conducción básicamente independientes, sistema de conducción de automóviles, sistema de conducción de gancho, inversor K-DRIVE al Los tres sistemas de conducción anteriores se reformaron con éxito, a continuación se describe principalmente el proceso de transformación de la conducción antes y después del sistema de caminar.

Esquema Ventajas
- Control vectorial de bucle abierto de corriente orientado al campo, variables del motor completamente desacopladas, gran par de baja frecuencia, respuesta rápida, etc.
- KD600adopta el modo de control vectorial de bucle abierto libre de PG y el modo V/F vectorizado, y amplifica la configuración del nivel de potencia de la primera marcha;
- Rango de frecuencia: configuración de segmento de 0,5-600 Hz, ajuste continuo continuo;
- Rango de voltaje de trabajo: 380 V ± 20 %, y el voltaje del bus cae a 360 V CC instantáneamente para un funcionamiento sin problemas;
- Capacidad de sobrecarga: 150% de la corriente nominal, 1 minuto permitido; 200 % de corriente nominal, se permite 1 s;
- Características del par: par de arranque, superior a 2 veces el par nominal; Par de baja frecuencia, superior a 1,6 veces el par nominal a 1 Hz; El par de frenado es mayor que el par nominal.
Características operativas
- El mecanismo de elevación de la grúa tiene un par de arranque elevado, que normalmente supera el 150% del par nominal. Si se consideran la sobrecarga y otros factores, se proporcionará al menos el 200% del par nominal durante el proceso de arranque y aceleración;
- Cuando el mecanismo de elevación gira hacia abajo, el motor estará en estado de generación de energía regenerativa y debe frenar el consumo de energía o retroalimentación regenerativa a la red;
- La carga del mecanismo de elevación cambia drásticamente cuando el objeto levantado sale o toca el suelo, y el convertidor de frecuencia deberá poder controlar la carga de impacto sin problemas;
- Como la velocidad de desplazamiento de los mecanismos de desplazamiento delantero y trasero de la grúa no es alta durante el diseño mecánico, se puede utilizar el convertidor para lograr una sobrevelocidad adecuada para mejorar la eficiencia de trabajo.
Diagrama de cableado sencillo
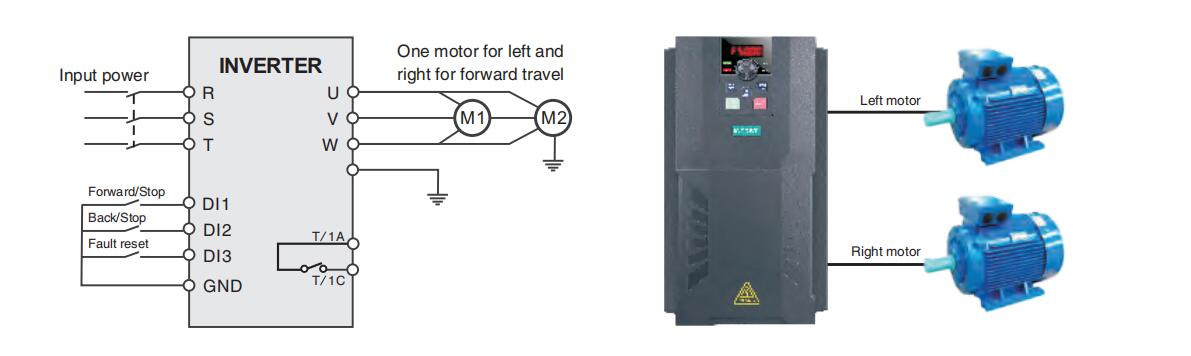
Configuración de parámetrosng y descripción(parámetros de desplazamiento del motor izquierdo y derecho)
| Parámetro | Explicar | Configuración de parámetros | Explicar |
| P0-00=0 | control de FV | P5-00=1 | adelante |
| P0-04=1 | Parada de inicio de terminal externo | P5-01=2 | realizar más tarde |
| P0-06=1 | Ajuste de frecuencia digital | P6-00=2 | Salida de fallo del relé 1 |
| P0-14=60.00 | Frecuencia máxima | P4-01=1,6 KW | Potencia del motor conectado |
| P0-16=60.00 | Frecuencia límite superior | P4-02=380V | Tensión nominal del motor |
| P0-11=60.00 | Frecuencia de ajuste digital | P4-04=3.3A | Corriente nominal del motor |
| P0-23=3,0s | tiempo de aceleración | P4-05=50Hz | Frecuencia nominal del motor |
| P0-24=2,0s | tiempo de desaceleración | P4-06=960R/Min | Velocidad nominal del motor |
| Nota: Cuando se utiliza un convertidor de frecuencia con dos motores, se recomienda encarecidamente instalar un relé térmico correspondiente en el extremo frontal de cada motor para proteger cada motor. | |||
Análisis del efecto de la operación.
El convertidor de frecuencia de la serie KD600 ha llevado a cabo una transformación de conversión de frecuencia en el sistema móvil y el efecto de transformación es relativamente ideal, como se muestra principalmente en:
- Se realizan arranque y parada suaves durante el arranque, lo que reduce el impacto en la red eléctrica;
- Después de usar el convertidor de frecuencia, se omiten el contactor de cambio original y la resistencia de regulación de velocidad, lo que no solo ahorra costos de mantenimiento, sino que también reduce el tiempo de inactividad por mantenimiento, aumentando así la producción;
- Cuando el gancho principal funciona a 5 Hz ~ 30 Hz, el efecto de ahorro de energía es muy evidente;
- El convertidor de frecuencia se utiliza para controlar el desplazamiento delantero y trasero, y las series de mecanismos de desplazamiento izquierdo y derecho pueden realizar el trabajo de sobrefrecuencia. Bajo la premisa de garantizar la seguridad, la eficiencia del trabajo mejora considerablemente y también se reduce la carga de trabajo de mantenimiento del equipo móvil debido al reemplazo frecuente de los contactores de CA.
Comentarios finales
El convertidor de frecuencia se utiliza para controlar las series de mecanismos de marcha hacia adelante y hacia atrás y hacia la izquierda y la derecha, que pueden realizar trabajos de overclocking, mejorar en gran medida la eficiencia del trabajo bajo la premisa de garantizar la seguridad y también reducir la carga de trabajo de mantenimiento del equipo de conducción debido a Reemplazo frecuente de contactores de CA.
Sitio de aplicación

Hora de publicación: 17-nov-2023